
Новини
Комахи допомогли дістатися до кровоносних судин мозку
Технології
Дослідники «підглянули» за комахами і розробили катетер, здатний безпечно і швидко переміщатися по кровоносних судинах головного мозку.
Деякі аневризми розташовуються в дуже важкодоступних місцях, через що дістатися до них за допомогою існуючих катетерів практично неможливо. Вчені придумали нові катетери, принцип роботи яких вони «підглянули» у комах
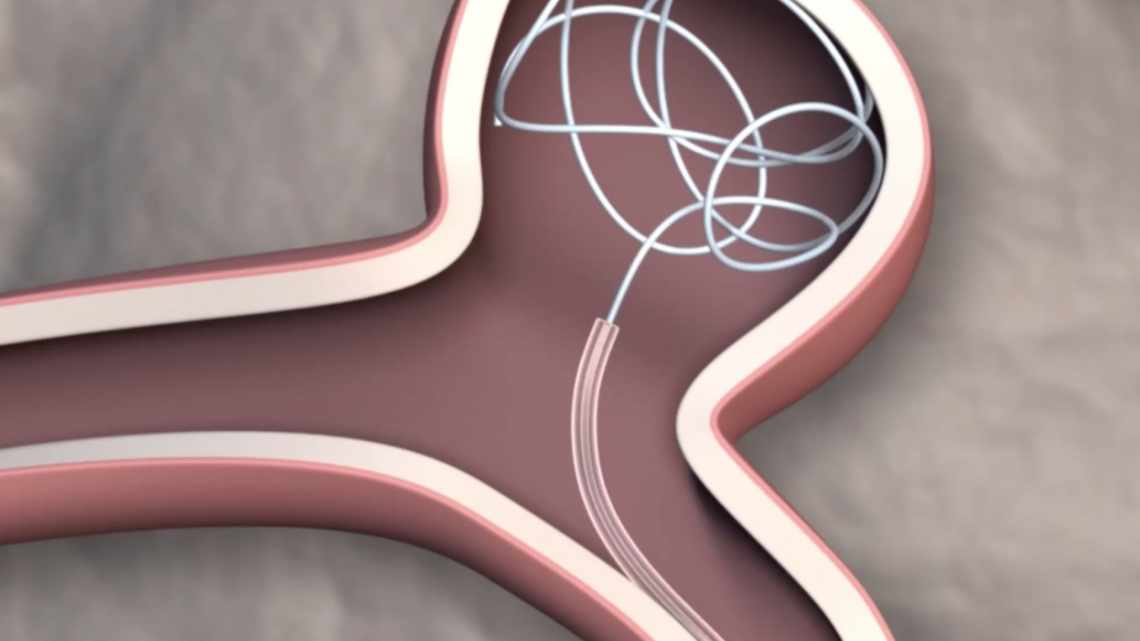
Аневризма - це патологічне випинання стінки кровоносної судини. Сьогодні нейрохірурги лікують аневризми головного мозку, вводячи катетери в артерію біля паху, а потім направляючи його через аорту і вгору в мозку г. Ці дроти мають вигнутий наконечник, який допомагає їм рухатися всередині судини, поки аневризму не буде знайдено.
Проблема в тому, що ці катетери потім потрібно видалити, після того як за допомогою спеціальних пристосувань буде заблокований приплив крові до аневризмі для запобігання крововиливу в мозку р. Але цей процес вилучення часто зміщує катетер і змінює його положення. Це, своєю чергою, ускладнює лікування аневризм, розташованих у певних частинах судини. Серед них - аневризми судин головного мозку, які схильні до розриву і вражають понад 160 мільйонів осіб у всьому світі. Близько чверті з них не піддаються лікуванню, тому що просто занадто важкодоступні.
Для вирішення цієї проблеми дослідники вирішили розробити новий катетер. Авторів розробки надихнули, як не дивно, комахи. Вчені проаналізували деформації та гідравлічні процеси, що відбуваються в ногах комах і джгутиках, а також при спарюванні жуків. Спостереження за тваринами допомогло дослідникам створити м'який роботизований мікрокатетер з гідравлічним приводом, який ідеальний для виконання тонких нейрохірургічних операцій.
Пристрій являє собою силіконовий катетер з кількома внутрішніми порожнинами, які наповнені нешкідливим фізіологічним розчином для створення тиску. Саме це дозволяє керувати такими катетерами ззовні, регулюючи тиск рідини. Технологія була перевірена на свинях - тваринам вводили катетер з керованим наконечником в мозкову артерію. Пристрій було видно на рентгенівських знімках, а управління його рухом виявилося дуже гнучким і ефективним.
Стаття опублікована в журналі Science Robotics.