
Новини
Орнітоптер зачепив крилом перешкоду і продовжив політ
Навчання
Корейські інженери, які створюють мініатюрні орнітоптери, розробили для них крило, яке імітує особливості конструкції крил жуків-носорогів. Завдяки наявності рухомого вузла, розташованого на передній кромці, і здатності упруго згинатися і розпрямлятися біоміметичне крило дозволяє пом'якшувати удари об перешкоди. Дрон з такими крилами може продовжувати стабільний політ і не падати навіть у разі ударів кінчиками крил з навколишніми предметами, йдеться в статті, опублікованій в журналі.
При польотах дронів у приміщеннях з великою кількістю перешкод зростає ризик зіткнень. Для того, щоб захистити мульткоптери, зазвичай використовують різні системи протиударного захисту, які запобігають контакту роторів з предметами при зіткненні. Наприклад, британські інженери створили бампер для квадрокоптера у вигляді кільцевої рами, на зовнішній стороні якої розташовані пружні елементи, зроблені із застосуванням техніки орігамі. Ця конструкція покликана приймати на себе удари при можливих зіткненнях мультироторного дрона з перешкодами і зменшувати вплив зіткнень на траєкторію польоту. Однак подібні схеми захисту не підходять для орнітоптерів (махолетів), політ яких відбувається за рахунок помахів крил. Безпілотники такого типу зазвичай мають мініатюрні розміри і громіздкі захисні конструкції значно погіршують їх льотні характеристики.
Пак Чхоль-Хун (Hoon Cheol Park) і Хоанг Ву Фан (Hoang Vu Phan) з південнокорейського Університету Конкук створили біоміметичні крила для орнітоптера, які дозволяють продовжувати політ, навіть якщо він зачіпає ними за перешкоди. Як прототип інженери вибрали крила жука-носорога виду. Довжина його крил у розкладеному стані перевищує довжину тіла, що пов'язано з необхідністю створювати достатню підйомну силу в польоті. У стані спокою крила згинаються, переламуючись по передній кромці і утворюючи кілька складок, після чого розташовуються вздовж черевця комахи, прикриваються зверху жорсткими пластинами надкрилій для захисту. Повне розправлення крил у польоті відбувається за рахунок сил інерції та аеродинамічних сил під час швидких помахів.
Дослідники провели серію спостережень за польотами жуків через простір з перешкодами у вигляді жердин. З'ясувалося, що в низці випадків приховування крила з перешкодою під час польоту не призводить до падіння комахи. У таких випадках крило завдяки своїй здатності частково згинатися просто складається і розправляється знову при наступних помахах після проходження перешкоди. Також при цьому жук намагається компенсувати зміну траєкторії рухом лапок і зміною частоти помахів правого і лівого крил. Удари ж в область крила, розташовану за точкою згину ближче до тіла комахи, призводять до переривання польоту і падіння.
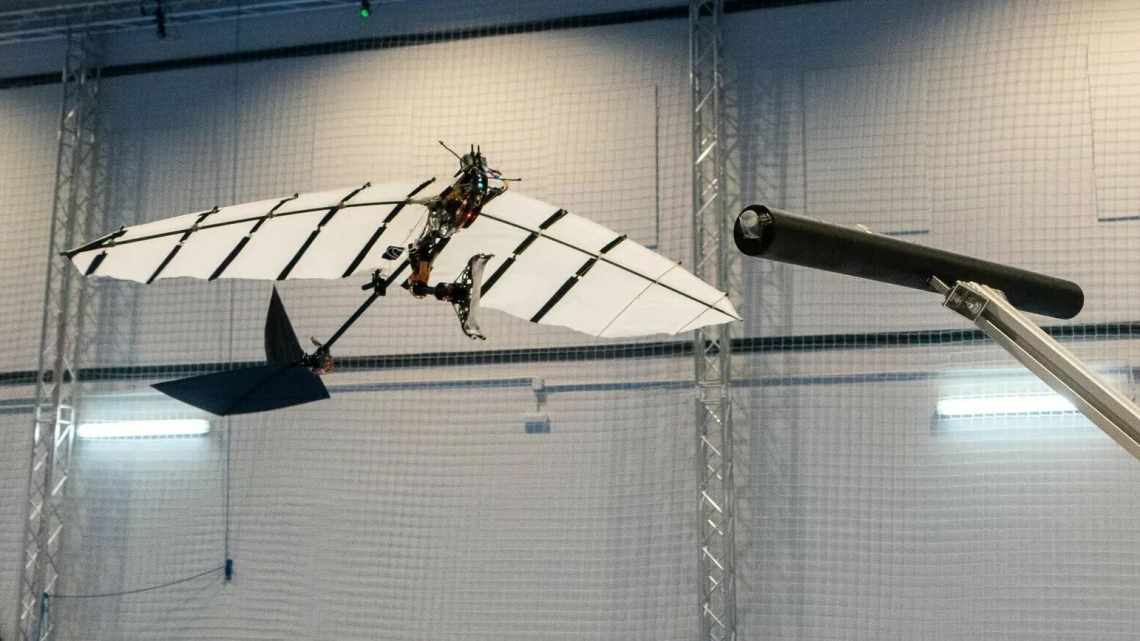
Здатність крила жуків-носорогів амортизувати удари за рахунок згинання інженери використовували при створенні крил для орнітоптера. Як основу вони використовували свою попередню розробку - безхвостий орнітоптер KUBeetle-S. У рух крила приводить один електромотор через двоступеневий редуктор і трансмісію, що перетворює обертальний рух мотора в періодичні помахи крил. Управління відбувається за допомогою трьох сервомоторів, два з яких забезпечують нахил платформи з крилами і зміну вектора тяги, завдяки чому здійснюється управління по крену і тангажу, а третій використовується для відхилення нижніх кромок крил в протилежні сторони і управління по осі рискання. Дрон оснащений гіроскопом і акселерометром, а бортова електроніка управляється мікроконтролером ATmega328P-MU. Як джерело живлення використано літій-полімерний акумулятор ємністю 70 міліампер-годин. Маса апарату становить 17,8 грам. У режимі висіння частота махів крилами дорівнює 26 герцам з амплітудою 190 градусів.
Крила створені з поліімідної плівки, а «прожилки» в крилі, що грають роль каркаса і імітують конструкцію крила комахи, виготовлені з карбонових трубок і смуг з вуглецевих препрегів. Для створення упругого гнучкого з'єднання на передній кромці інженери використовували дріт з нікель-титанового сплаву. Це з'єднання забезпечує вигин як у поздовжньому, так і поперечному напрямках. Крило має довжину вісім сантиметрів і площа трохи більше 19 квадратних сантиметрів при вазі в 0,22 грам, що становить близько 1,2 відсотка від загальної маси дрона.
Випробування показали, що нові крила орнітоптера, незважаючи на зниження енергоефективності через наявність додаткового рухомого з'єднання в конструкції, створюють достатню підйомну силу для польоту і зависання на місці. В експериментах з ударіння з перешкодами в польоті дрон пролітав повз вертикальні стрижні, стикаючись з ними кінчиками крил. Завдяки здатності крил згинатися аналогічно крилам жука-носорога вдалося зменшити виникаючий при ударі кінцями крил додатковий момент по осі рискання на дві третини в порівнянні з негнущим крилом. Це дозволяє дрону повертатися до стабільного польоту після ударіння, тоді як у випадку з крилом без механізму згинання такі удари призводять до падіння орнітоптера. Також інженери продемонстрували здатність орнітоптера зі згинаним крилом пролітати між двома перешкодами, ширина проміжку між якими менша, ніж розмах крил апарату, що неможливо для махолетів зі звичайною конструкцією крил.
Для того щоб підвищити шанси на виживання літаючих дронів у просторі з великою кількістю перешкод інженери не тільки зміцнюють і вдосконалюють їх конструкцію, а й оснащують ефективними алгоритмами. Наприклад, американські інженери використовували методи глибокого навчання для того, щоб навчити рій дронів прокладати шлях у захаращених приміщеннях, не стикаючись з оточенням і один з одним.