
Новини
Навчання
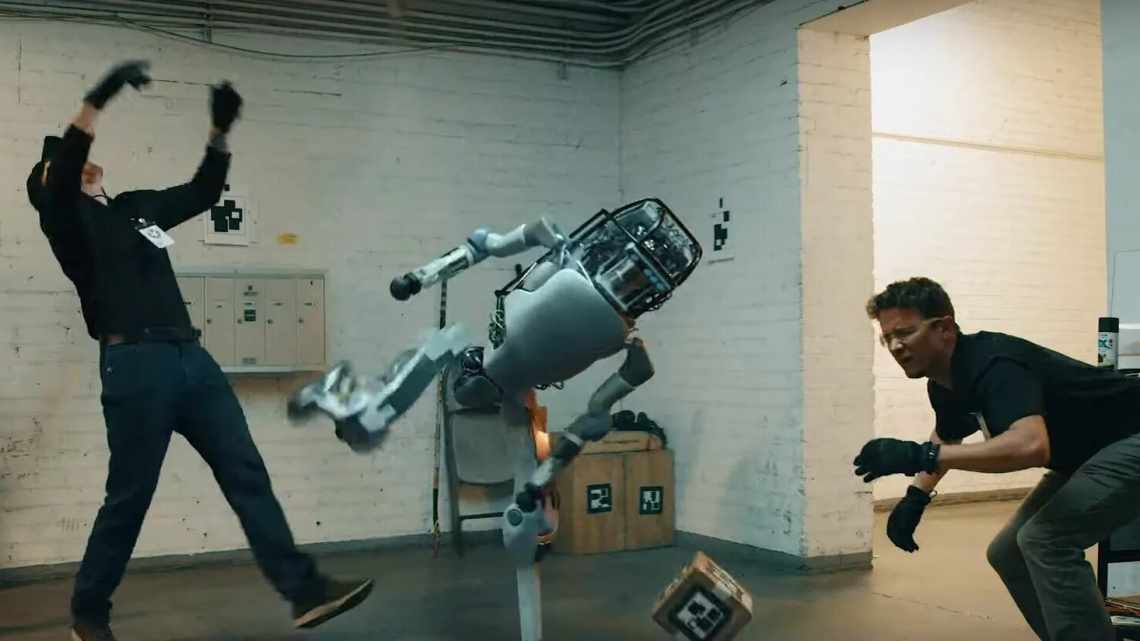
Дослідники Google за допомогою глибинного машинного навчання навчили роботів координувати свої рухи при захопленні предметів. Про це повідомляється в блозі компанії, препринт статті доступний на сайті .Спеціалісти Google навчили роботів зорово-моторної координації рухів при захопленні предметів. Для цього вони навчили згорточну нейронну мережу передбачати ймовірність успішного захоплення, ґрунтуючись на зображеннях камери незалежно від її калібрування і вихідного положення робота.
Навчання
Американські дослідники виявили, що пересадка мікровезікул людських стовбурових клітин в гіпокамп щурів ефективно оберігає їх мозок від наслідків радіоактивного опромінення. Результати роботи опубліковані в.
Навчання
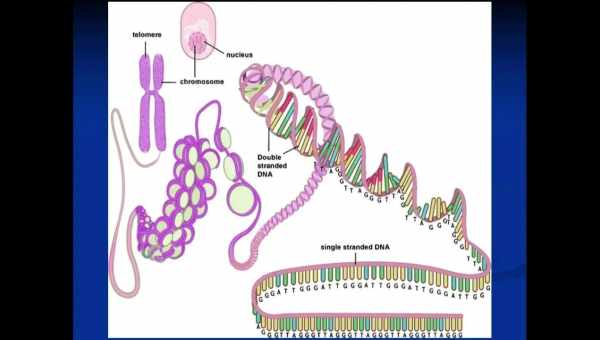
Дослідники з США і Коста-Ріки дійшли висновку, що такі прості показники як вік і рухова активність дозволяють значно точніше передбачити п'ятирічну виживаність літніх людей, ніж довжина теломер. Результати роботи опубліковані в.

Навчання
Американські дослідники склали список газів, за змістом яких в атмосфері екзопланет можна запідозрити наявність на них життя. Результати роботи опубліковані в журналі.

Навчання
Німецькі вчені застосували нейромережі для перенесення художнього стилю Вінсента Ван Гога, Едварда Мунка та інших художників на мультфільми. Препринт публікації доступний на arXiv.org.