
Новини
Чотирилапого робота поставили на колеса
Навчання
Швейцарські інженери розробили алгоритм для управління чотирилапими роботами з колесами на кінцях ніг. Застосувавши його на новій модифікації робота ANYmal, вони показали, що робот під управлінням такого алгоритму пересувається по місцевості з різним рельєфом краще, ніж аналогічні розробки. Стаття буде представлена на конференції ICRA 2019.
Інженери застосовують у своїх роботах різні механізми пересування, такі як колеса, гусеничні приводи і ноги. Вони відрізняються не тільки конструкцією, а й ходовими якостями, що роблять їх оптимальними для тих чи інших завдань. Наприклад, колеса дозволяють пересуватися швидко і спрощують алгоритми управління, а ноги дозволяють долати перешкоди і пересуватися по складному рельєфу. Існують навіть роботи, в яких застосовуються обидва цих механізми, але майже всі з них активно використовують тільки один з механізмів або застосовують повільні статичні рухи.
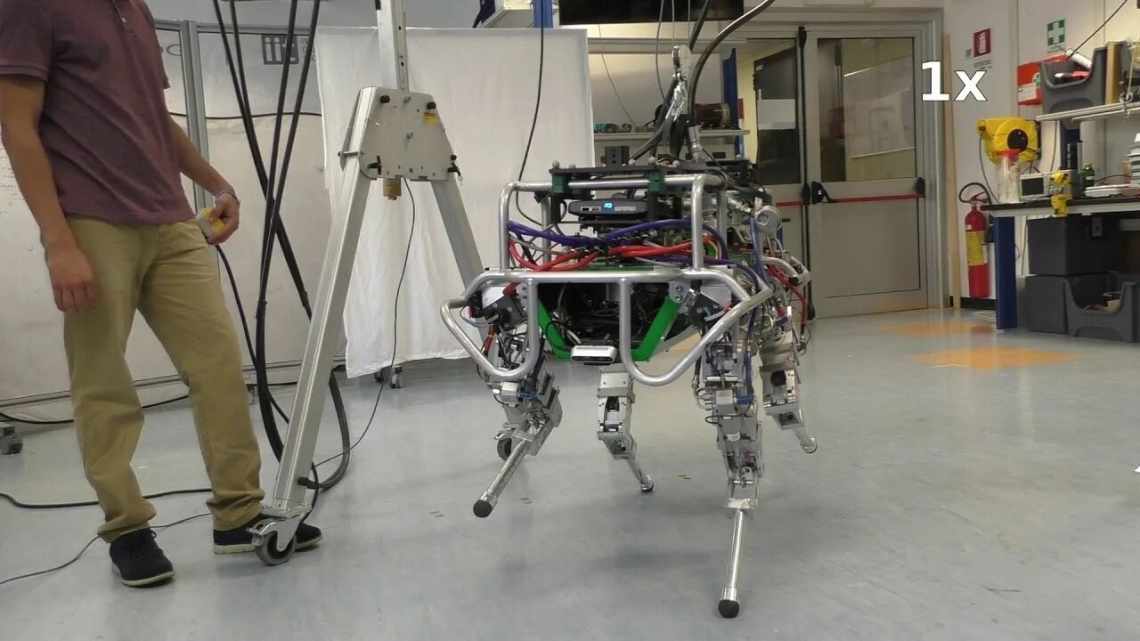
Марко Хуттер (Marco Hutter) і його колеги зі Швейцарської вищої технічної школи Цюріха створили нову модифікацію чотириногого робота ANYmal, оснащену чотирма ногами з колесами на кінцях, здатну активно використовувати два типи рухів. Робот ANYmal був раніше розроблений в тій же організації і використовувався цією та іншими дослідницькими групами для експериментів з різними алгоритмами управління. Наприклад, нещодавно його навчили ритмічно танцювати під музику. Робот приводиться в рух 12 електромоторами, завдяки яким він може рухати кожною ногою в практично будь-якому напрямку.
Для своєї нової роботи інженери модифікували ANYmal, прикріпивши на кінець кожної ноги колесо з електромотором. Але головне досягнення роботи полягає в алгоритмі, що дозволяє роботу активно використовувати ноги і колеса. Алгоритм заснований на поширеному в області крокових роботів методі пошуку точок нульового моменту, при якому робот розраховує свої рухи таким чином, щоб сума всіх зовнішніх сил була спрямована до поверхні. У даному випадку алгоритм постійно розраховує трикутник, обмежений трьома точками контакту ніг з поверхнею, всередині якого може розташовуватися точка нульового моменту.
Робот може пересуватися на колесах вперед, повертати за допомогою кроків, а також крокувати вперед, якщо перед ним знаходиться перешкода, на яку необхідно піднятися. Під час руху робот постійно підлаштовує положення кожної ноги таким чином, щоб мінімізувати переміщення центру мас по висоті.
У майбутньому інженери планують продовжувати вдосконалювати алгоритм. Зокрема, вони мають намір навчити його застосовувати одночасно ходьбу і переміщення на колесах.
Нещодавно інша група європейських інженерів представила робота Centauro, який також має чотири ноги з колесами на кінцях, але крім цього оснащений двома руками і вміє повертати колеса. На початку вересня інженери продемонстрували незвичайну систему управління цим роботом, що дозволяє йому копіювати рухи людини, спираючись на зображення з камеру.